
神经外科手术导航系统发展概述与展望
颅脑神经功能重要、结构复杂、组织强度低,对颅脑神经进行各种手术难度高、风险大,例如脑部肿瘤切除、癫痫病灶切除等一直以来都是神经外科的难点,为了实现精确的手术位置指引,定位病灶,医学界作出了持续的努力,得到了不断革新优化的手术导航方案。 本研...
颅脑神经功能重要、结构复杂、组织强度低,对颅脑神经进行各种手术难度高、风险大,例如脑部肿瘤切除、癫痫病灶切除等一直以来都是神经外科的难点,为了实现精确的手术位置指引,定位病灶,医学界作出了持续的努力,得到了不断革新优化的手术导航方案。 本研...

神经导航技术(Neuronavigation),又称图像引导神经外科(Image-guided neurosurgery,IGNS),是基于CT、MRI等术前影像数据建立图像引导空间,借助光学(或磁学)跟踪仪实时跟踪显示手术器械相对于脑组织...

神经导航(neuronavigation)一词源于navigation, 后者指在航海或陆地航行中依赖实时定位系统(real-time positioning system)选择简捷、安全的路径(approach)准确到达目的地。类似的,将...

六轴机器人和七轴机器人在设计、功能和应用场景上存在明显区别。六轴机器人是工业机器人的传统架构,而七轴机器人则在多自由度和灵活性方面进行了增强。 本文将在理解这两者的区别以及为何六轴机器人仍然是市场主流,从多个方面进行深入解读六轴和七轴区别:...

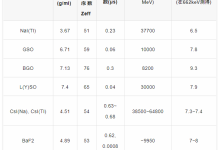
上一篇文章(系统灵敏度上)提到,对于一个PET系统,提升灵敏度的方法,可以分解为以下几个方面: 1、闪烁晶体:使用L(Y)SO为代表的快晶体取代以BGO为代表的慢晶体; 2、光电转换和信号处理:使用SiPM代替PMT,以及ASIC和FPGA...
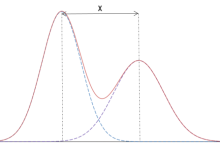
在之前的两期中,我们系统的介绍过了PET的空间分辨率(Spatial Resolution)和各项影响因素,以及点扩散函数(Point Spread Function, PSF)可以进行分辨率的补偿校正,重建出更为清晰的图像。 今天,在《系...
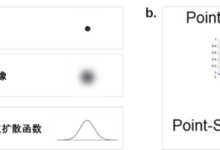
在第一期中(上期回顾),我们已经介绍过PET的空间分辨率,空间分辨率决定了PET是否能够“看得清”。但如果在空间分辨率的基础上通过点扩展函数(Point Spread Function, PSF)技术的重建,则可以看到更加清晰的图像,这就引...
在设计PET系统时,我们希望它作为一种影像检查设备,既能“看得到”,又能“看得清”。这就涉及到了PET系统的两个最重要的性能参数——系统灵敏度和空间分辨率。系统灵敏度决定了PET是否能够“看得到”,空间分辨率决定了PET是否能够“看得清”。...

在前几期心核联盟大咖谈讲座中(点击查看),心血管病专家与核医学专家共同深入讨论了D-SPECT CFR使用经验及其临床价值,了解冠脉血流储备CFR的定量分析方法以及D-SPECT冠脉血流定量的临床应用。 核医学显像作为无创评估整体冠脉丛心肌...
上期(点击观看)我们了解了MFR 和 CFR 作为唯一的无创评价整体冠脉丛的血流量和血流储备的金标准,反映心外膜冠脉和微循环的整体功能。对冠脉均衡性病变、微循环障碍等缺血性疾病诊断有至关重要的作用。同时,结合无创 CFR 和 有创FFR 两...

D-SPECT 与 PET测量心肌血流一致性 D-SPECT CFR灵敏度、特异性高,诊断符合率高达96.7% 参考文献: 1. Gould KL. Does coronary flow trump coronary anatomy? JA...

前言 昨天,一位朋友问我:用什么样的技术能制造出一台优秀的 C 形臂?对于这个问题,我其实多年前就在思考,逐渐总结出了一些见解。我想与大家分享一下我的看法。 一、骨科医生的需求 核心:好图、好用、不坏和低剂量。 首先,C形臂是影像设备,一台...