在当今信息时代,实时数据便捷获取,显著助力决策制定。
在癌症治疗领域,尤其是放射治疗,界内专家正逐步开拓,借助更高效、更智能的信息技术,迎接实时自适应放射治疗的新时代。
此治疗技术包含三个关键步骤,类似于无人驾驶汽车技术, 形成“观察-思考-行动”的持续循环。
首先,通过成像系统监测患者解剖结构与生理状态的时间序列演变。
然后,基于当前及过往信息,利用可行的自适应自由度以优化治疗方案。
本文将深入探讨实时自适应放射治疗的这三个步骤,回顾其历史背景,审视临床依据,并展望未来发展。
实时自适应放射治疗简介
——以无人驾驶汽车技术为现实类比
随着传感器、处理能力及人工智能技术的飞速发展,无人驾驶汽车技术正在快速进步,其主要动力源于大幅提升道路安全的潜力。
采用无人驾驶技术的主要原因包括减少道路交通事故带来的巨大人力与经济损耗,如2010年美国因交通事故导致33,000人死亡,经济损失高达8710亿美元,此外还可能显著减少保险成本,并满足消费者对自身及亲人安全的需求。
自动化技术的引入替代了传统的手动操作,使驾驶员能够执行更高效的任务。
行业分析预计,在2020年代初将出现针对高端市场的商用无人驾驶汽车选项,而该技术的广泛应用预计将在2030年代中期实现。
与此同时,实时自适应放射治疗技术也在快速发展,其通过测量和校正治疗过程中的解剖变化,不仅提高了治疗安全性,还实现了肿瘤定位的更高精度和临床靶区边缘的最小化。
采用此技术的原因包括降低治疗副作用相关的人力和经济成本、改善局部控制率、提升患者吞吐量,以及可能通过自动化技术减少对人员的依赖。
无人驾驶汽车通过一系列传感器实时感知周围环境。它们利用人工智能将关于环境中静态和动态物体性质和行为的实时信息与先验知识相结合,以确定最佳行动方案,从而进行“思考”。
到达目的地的初步计划会在途中根据不断变化的交通状况、天气和已识别的风险进行持续调整。无人驾驶汽车通过控制两个简单的变量——方向和速度来执行操作。
观察、思考和行动这三个步骤与实时自适应放射治疗有着直接的类比关系。
系统通过一种或多种传感器观察患者。它们将实时患者感知信息与来自治疗计划和运动测量的先验知识相结合,以确定最佳行动方案,从而进行“思考”。
为了适应不断变化的解剖结构,实现所需剂量的计划会进行持续调整。实时自适应放射治疗系统通过控制两个简单的变量——束靶对准和剂量率来执行操作。
无人驾驶汽车技术的三个常见任务“观察、思考、行动”与实时自适应放射治疗的类比关系如图1所示。
图1:无人驾驶汽车技术和实时自适应放射治疗的共同阶段。
行动:通过控制仅两个变量(方向和大小)来执行决策。
在现代图像引导放射治疗中,我们在治疗前对患者的图像进行成像。这些信息虽然有用,但立即变得过时。我们需要了解患者解剖结构的时间是在治疗过程中,而不是在治疗前。
呼吸、循环、消化和肌肉系统会导致肿瘤在亚秒到分钟的时间尺度上运动(图2)。
图2 实时适应性放射治疗的关键驱动力很简单,即肿瘤和正常组织在治疗过程中会移动。这种运动挑战了放射治疗的基本原则,即照射肿瘤并减少正常组织的剂量。
以呼吸系统为例,Shah等人的数据展示了患者每日测量的肿瘤运动幅度和变异性。呼吸引起的运动在每个呼吸周期之间会有所不同——从几毫米到几厘米不等,且随着周期形状的变化而变化——并且在每天之间也会有所不同,如图3所示。这种运动变异性挑战了我们根据先前观察对患者运动所做的任何假设,因为我们无法自信地预测治疗过程中的运动幅度。
图3 不同治疗日测得的肺癌肿瘤运动,显示了周期与周期之间以及日与日之间运动的变异性。
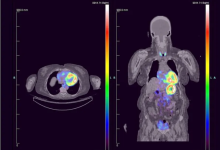
图4展示了前列腺癌放射治疗期间消化和/或肌肉运动对剂量学的影响,以及实时适应的益处。
图4 前列腺癌放射治疗过程中消化和/或肌肉运动对剂量的影响。计划的患者剂量(左)、实时适应性放射治疗下的剂量(中)和估计的未进行实时适应性放射治疗的剂量(右)表明,当存在未考虑到的运动时,靶区剂量不足,而正常组织剂量过高。颜色洗脱跨越了95%-108%的剂量间隔。
当治疗过程中出现未考虑到的运动时,靶区可能会剂量不足,而正常组织则可能剂量过大。
放射治疗传递的实时适应从根本上提高了移动病灶的定位准确性,从而改善了安全性和有效性。随着准确性的提高,边缘减少,进而减少了附近健康组织的附带辐射暴露。
在所有临床实施的跟踪系统中,包括机器人跟踪、MLC跟踪和万向节跟踪,均表明肺癌边缘可减少多达50%,应用实时适应技术可使平均肺剂量减少多达1 Gy。肺毒性表现出剂量反应关系,因此在整个人群中,患者应在保持高肿瘤控制率的同时降低毒性。
另一项益处可能惠及寡转移患者,因为任何肺剂量的减少都为患者在新病灶出现时接受进一步放射治疗提供了机会。
实时适应技术提供的另一个相关选项在同毒性处方中具有优势,其中减少不确定性的边缘允许增加靶区剂量(可能超过肿瘤致死剂量的极限),这在其他情况下是不可能的。
最近的一项研究表明,肝癌患者可以从这种益处中受益,其中同毒性处方旨在使靶区剂量超过BED 100 Gy,但可能受到保留肝功能所需健康肝脏保留体积(<13 Gy)的限制。
加雷特等人计划了20例肝脏立体定向病例,包括有和无内部靶体积(ITV)扩展两种情况,并表明在13个未能同时满足肝脏和肿瘤约束条件的ITV计划中,有11个计划在不使用ITV计划的情况下同时满足了这两个约束条件。
最近对胰腺癌的每日适应性计划研究也显示了更优的患者预后,鲁德拉等人表明,能够接收BED > 70 Gy的患者数量有所增加,并预测总体生存率将得到改善。
每日适应性治疗可以视为实时适应的一个子集,其中考虑了分次间的变化,但未考虑分次内的变化。随着MR直线加速器、PET直线加速器和医疗照护的各个环节中图像配准的改进,实时几何(位置/形状)和放射生物学(功能成像)都显示出了巨大的前景。
对于前列腺癌,PSMA-PET极大地改变了放射治疗的靶体积,并推动了更小范围的靶向前列腺内和转移性结节的放射治疗——这需要剂量绘制(dose painting.)等高级计划技术。
实时适应已被证明能够应对剂量绘制的挑战。在功能成像的串联下,多叶准直器(MLC)跟踪准确地再现了运动状态下的计划剂量分布。通过更频繁或治疗中的成像,在存在运动的情况下,功能反应和成像将常规配对,以最大限度地利用实时适应的放射治疗。这种技术演变可能会带来新的选择,如治疗心脏病或治疗中央型肺病变。
虽然实时适应技术在专业直线加速器上已经应用了多年,并且在MR直线加速器上具有巨大的潜力,但在大多数诊所中发现的标准配置的直线加速器上,仅进行了相对较小规模的临床试验。
目前仍在继续研究无标记肿瘤追踪和基于kV的追踪技术,以扩大能够接受实时适应治疗的患者群体。
实时适应性放射治疗历史发展中的一些临床里程碑如表1所示。重要的是要承认实时适应性放射治疗的先驱者:筑波大学在30多年前首次使用外部传感器进行呼吸门控治疗患者,以及北海道大学的Shiroto教授及其团队在20多年前(1998年)首次使用X射线引导基准标记进行呼吸门控治疗患者。
如图5所示,实时适应性放射治疗中的靶区定位技术涵盖了电磁频谱的许多部分。Calypso和RayPilot等技术利用射频波,与集成MRI-放射治疗系统一样。这些表面或表面标记技术可以与其他成像系统(如X射线)结合使用,以在较高的时间分辨率下给出内部靶区位置,并且成像剂量低于连续X射线成像。
图5:实时自适应放射治疗中的靶区定位技术,包括电磁频谱和超声波的各种频率。
千伏和兆伏成像系统分别利用专用X射线管和治疗束本身的X射线。
Navotek系统(现已停产)曾使用γ射线进行实时图像引导。
图5中还展示了一个非电磁图像引导的例子,即快速发展的超声技术。
目前最先进的临床实时适应性放射治疗技术主要校正靶区几何形状的变化——本质上是一种使射束指向移动靶区的一级校正。
通过实时优化患者接收的剂量(即感兴趣的量),可以实现更高阶的校正,从而进一步改进这种方法。剂量引导的实时治疗适应性的一个先决条件是,在治疗过程中能够实时估算移动解剖结构所接收的剂量。
迄今为止,为了获得足够快的、包含运动信息的实时剂量重建,要么依赖于治疗计划系统预先计算的剂量,要么将剂量计算的复杂性降到最低水平。
Fast等人将所有治疗射束细分为小射束,并预先计算了患者解剖结构中每个可能小射束贡献的剂量分布。在治疗过程中,通过根据当前射束形状和靶区位置将每个剂量增量计算中的预先计算剂量分配给不同的组织元素,从而获得实时包含运动信息的剂量重建。使用预先计算的剂量使得在不变的实时速度下使用更高级的剂量算法成为可能,例如包括磁场的影响。
在前列腺和肺部计划的剂量传输过程中,已经展示了这种方法的实时剂量重建。
在实验中没有使用运动体模或监测系统,但通过将预定义的靶区位置流实时传输到剂量重建软件中来模拟运动。对于肺部肿瘤,剂量重建使用了每个呼吸相位的预先计算剂量和变形向量场,以便将剂量变形并累加到参考相位上。
快速包含运动的剂量重建也可以通过将复杂性降到最低来实现,正如Ravkilde等人所提出并在他们的DoseTracker软件中实现的那样。应用了一种简化的笔形束算法,该算法假设组织密度均匀(通常为水)、患者表面平整、剂量分布均匀,并且所有照射野的输出因子和深度剂量曲线都相同。
DoseTracker会实时计算一组计算点中的实际包含运动的剂量和计划静态剂量。将动态剂量与静态剂量进行比较,可得出运动引起的剂量误差,尽管剂量算法有所简化,但结果表明该误差与体模剂量测量结果非常吻合。主要原因是,当比较两种剂量时,动态剂量和静态剂量中存在的剂量计算误差往往会相互抵消。
在患者中,使用DoseTracker对肝脏和前列腺计划进行(离线)实时剂量重建,结果显示运动引起的靶区剂量覆盖率降低与治疗计划系统计算结果非常一致。
图6(A)治疗计划系统(TPS)计算的前列腺剂量(上)和在模拟双弧VMAT计划递送过程中由DoseTracker实时计算的前列腺剂量(下),图中未显示运动,且前列腺运动如图(B)所示。剂量颜色洗脱范围为90%-110%。轮廓线为前列腺(内轮廓)和计划靶体积(外轮廓)。实时重建剂量与更准确的TPS剂量计算结果基本一致。(C)DoseTracker(细曲线)和TPS(粗曲线)计算的图(A)中所示3点因运动引起的累积剂量误差。5-10秒后的短暂前列腺前移(见图(B))导致点1处剂量减少5%。
一旦观察到解剖结构变化,完成适应性思考过程后,就需要采取行动来完成实时适应性放射治疗的循环。如表1所述,适应性放射治疗的最早实现是在靶区(或靶区位置的替代物)超出预定范围时关闭治疗射束。门控技术可以应用于呼吸运动,例如仅在呼气阶段出束,也可以应用于其他运动,例如如果前列腺从等中心点移动超出给定阈值,则暂停出束。门控技术的优点是易于使用和广泛应用。
门控技术的局限性在于射束关闭时效率会相应降低,以及靶区在门控限制范围内的残余运动。
门控限制越小,残余运动就越小,但效率会降低。相反,门控限制越高,残余运动就越多,但效率会提高
ViewRay系统已经实现了基于图像的门控技术,用于运动管理。
为了克服效率与残余运动之间的权衡,理想情况下,门控应与一种能够连续重新对准射束和运动靶区的方法相结合。
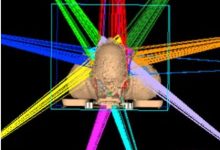
图7展示了在实时适应性放射治疗过程中击中靶区的四种技术。
图7 实时自适应放射治疗中的靶区命中技术包括机器人、万向节、多叶光栅准直器和治疗床追踪系统
在赛博刀(CyberKnife)直线加速器上,引入了同步方法这一开创性技术,用于连续重新对准射束和运动靶区。同步方法结合了近乎连续的表面位置监测和偶尔的双源X射线成像,以确定靶区在实时中的位置。射束-靶区校正采用了一种在许多复杂且精确的工业应用中广泛使用的技术——机器人。通过使用运动预测算法来考虑时间延迟。
第二种用于连续重新对准射束和运动靶区的技术是万向节直线加速器,这是一种新技术,其中的电机使直线加速器能够在两个方向(水平和垂直)上旋转,从而使射束能够跟随靶区。该技术使用近乎连续的表面位置监测和偶尔的双源X射线成像来确定靶区在实时中的位置,并将该位置信息传输给万向节直线加速器以驱动运动。不幸的是,万向节直线加速器的生产已经停止。
第三种用于连续重新对准射束和运动靶区的技术是多叶光栅准直器(MLC),这是一种广泛使用的射束适形工具。
MLC是四种适应系统中最小且最轻的,除了能够校正靶区平移运动外,非临床实验还证明了其能够实时校正单个靶区或具有差异运动的双靶区系统的旋转和形变。
第四种用于连续重新对准射束和运动靶区的技术是机器人治疗床——尽管该技术尚未在临床上实施。与多叶光栅准直器类似,治疗床也广泛可用,并且可广泛用于校正靶区平移运动。已经进行了几种治疗床追踪的实验实施,我们期待该技术的首次临床应用。
请注意,在图7中描述的四种光子束治疗技术中,治疗床追踪也适用于粒子束治疗。粒子治疗已经实现了临床上的门控控制,并且在模体中已经证明了实时粒子束导向。
未来展望
实时自适应放射治疗的未来前景与无人驾驶汽车技术一样显而易见——常规实施将大大提高效率和质量,同时带来巨大节省。但不确定的是实施的时间表。
通过省略耗时的患者仔细摆位、对齐和再对齐过程,效率将显著提高。
更短的治疗时间改善了患者的放疗体验,并降低了放疗的经济成本。
提高治疗精度还可以进一步实现低分割放疗,从而改善患者的体验和降低治疗成本。
质量的提升不仅体现在实现放疗的靶区——用辐射束击中肿瘤上,还体现在通过机器学习不断评估患者治疗的各个方面,包括靶区和正常组织轮廓、时间/剂量/分割、疾病变化、合并症、遗传学、液体活检等,以进一步实现个性化护理并最大化每位患者的治疗效果。
将个别患者的数据与从数千篇科学文章中挖掘出的人群数据相结合,将有利于当前患者,进而利用从治疗中获得的信息来造福未来的患者。
总结
用于解释解剖结构实时变化的运动管理技术已经临床应用了30多年。在广泛实施实时自适应放疗方面取得了稳步进展。
未来的挑战与技术发展和经济驱动因素相一致,即利用自动化使癌症放疗治疗更快、更高效、更精确。
我们呼吁制造商、研究人员、政府和消费者共同努力,实现实时自适应放疗的未来。
Keall P, Poulsen P, Booth J T. See, Think, and Act: Real-Time Adaptive Radiotherapy[J]. Seminars in Radiation Oncology, 2019, 29(3):228-235. DOI:10.1016/j.semradonc.2019.02.005.
https://doi.org/10.1016/j.semradonc.2019.02.005
说明:文章有删减,查看完整内容,请查看原文献。
版权声明:本文采用知识共享 署名4.0国际许可协议 [BY-NC-SA] 进行授权
文章名称:《观察、思考、行动:实时自适应放射治疗的三重奏》
文章链接:
https://www.qixiezhixin.com/9605.html
本站所有非原创内容均来自转载或分享,仅供学习交流,不用于商业用途。如无意中侵犯了知识产权,请来信告知,将立即配合删除。Email:qixiezhongguo@qq.com