背景介绍
口腔种植手术:
为什么:龋齿(虫牙),牙周病,牙外伤,年龄增长,自然脱落等等

是什么:可以看到上图的种植体设计。将与人体骨质兼容性高的纯钛金属制造成类似牙根的圆柱体或螺纹形状,以外科小手术(开窗,备洞)的方式植入缺牙区的牙槽骨内,经过1~3 个月后,当人工牙根与牙槽骨密合后,安装基台用来稳定支撑连接种植体和牙冠,再安装牙冠。
怎么做
1.拍全景片,查看口腔的具体情况,是否有炎症、牙槽骨吸收等情况
2.备孔,在牙槽骨上制备一个孔,植入人工种植体。将牙骨床内严密缝合,大约一个星期后可以拆线。这次大概2个半月–3个月)
3.装基台,牙冠
全景片:下图是已经植入种植体装了基台,还没有戴牙冠


手术工具 “种植机”:前面是一个钻头,可更换球钻,先锋钻,扩孔钻等,最后换为种植体植入

1.口腔种植背景
牙齿是人体最坚硬的器官,任何缺失都会直接影响患者的口腔健康和面部美观。口腔种植是近些年来发展起来的口腔医学的一种新技术,口腔种植技术将牙种植体植入牙槽骨内,在实现骨结合的情况下,以种植体为人工牙根,最终实现缺牙修复的功能。目前已经成为缺牙治疗中不可或缺的重要手段。一般种植体植入手术只需要几十分钟至数小时即可以完成。牙种植技术能提高人类生存质量,因此种植牙被誉为“人类的第三副牙齿”。
2.口腔种植手术的发展的两个阶段
第一个阶段主要是口腔全景X线机二维诊断,医生凭经验制定手术方案和种植,只能依靠医生的主观想象来推测实际的三维结构关系。种植手术方案和手术实施完全由医生制定,手术对医生的业务水平依赖度极高,缺乏直观性和准确性,手术质量也难以保证。
第二个阶段是口腔三维数据诊断,通过电脑制定手术方案,个性化定制种植体和牙冠,通过在三维观察患者的口内数据,在电脑模拟种植方案,在此基础上设计出种植导板,并3D打印成型,确定种植体植入位置,选择合适的种植体类型,最终采用自由手进行种植。它将计算机的准确测量和预测转化为现实,使种植手术误差更小,种植体植入位置更加准确,但同时也有一些缺点,导板的设计与制作过程繁琐,每一步骤的偏差都会影响种植体最终植入位置的精确性,而且需要其他软件,设备配合使用,成本较高,受患者开口度的影响,降低了对种植位点和方向的控制力,术中导板的应用会阻碍种植钻头的水进入种植窝,不利于热量的散发;术中钻头可自由操作的空间减小,并且受张口度大小的影响;术中只能根据术前设计进行操作,不能随时调整位置和角度。
3.口腔种植手术现状
目前国内从事口腔种植的医生人数还较少,水平也参差不齐。而口腔种植作为一项对操作精度和经验水平都有极高要求的医疗技术,任何操作的微小失误和精度偏差都会影响到远期的功能和美观效果,甚至会损伤下颌神经、上颌窦底及鼻底黏膜等重要解剖结构,造成不必要的并发症等等。
口腔种植手术导航定位系统是在第二个阶段上发展而来,无需借助导板等辅助工具,主要用于在口腔种植手术过程中对手术器械进行空间定位和定向,辅助医生进行术前计划和术中指导。通过系统软件进行口腔数据的三维重建,由医生在软件规划种植路径,然后由机械臂自动完成种植。

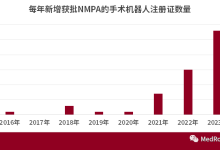
4.拿到NMPA
目前国内已经上市获NMPA认证的口腔手术机器人有三家公司,包括雅客智慧,柏慧维康的”瑞医博”,迪凯尔,目前迪凯尔已上市的产品没有包括机械臂,还是采用医生自由手种植。佩戴机械臂的产品正在临床中,预计明年上市。
雅客智慧:


2013年,空军军医大学口腔医院与北京航空航天大学机器人研究所立项,共同研发种植牙机器人。
2017年9月16日上午,第四军医大学口腔医院种植科手术室内,在我国著名口腔修复学专家赵铱民教授及其团队的辅助操作下,一台自主式种植牙手术机器人根据预先设定指令,成功为一名女性完成了两颗缺牙的种植即刻修复。
2018年3月,医院将种植牙机器人相关知识产权授权于北京雅客智慧科技有限公司,进行产品转化。
2021年9月14日,雅客智慧种植牙机器人获国家药监局审批上市,7月雅客智慧申请的口腔数字化软件获批,用于制定口腔种植手术计划。

柏慧维康-瑞医博:


“瑞医博”口腔手术机器人是国内首款获得NMPA认证的口腔手术机器人产品。医生在“瑞医博”的定位辅助下可精准完成口腔种植手术,精度误差控制在1°和0.5mm以内,学习曲线大幅降低,缩短手术时间,实现标准化种植。目前,瑞医博口腔手术机器人主要应用于单颗、多颗、对侧牙列种植手术,在机器人的辅助下,医生可以完成标准化、高精度、智能化手术,未来还将拓展至即刻种植、全牙列种植、无牙颌种植、穿颧种植、备牙等领域。此外,口腔手术空间狭小,操作角度有限,借助力传感功能,医生可以轻松地将种植手机调整至理想区域和位置,保障安全的同时提升手术效率。为减少局麻条件下患者位移带来的误差,“瑞医博”研发出随动功能,光学跟踪定位仪以每分钟1000次的频率实时捕捉患者位置,监测位移达到0.1mm,即使患者术中出现位移,机器人始终能够锁定靶点和路径,顺利完成手术。

迪凯尔:



5.口腔手术机器人优势
相比于传统手术机器人,使用种植机器人进行种植牙手术一般需要1名医生,两名护士在旁边辅助,医生不需要很丰富的临床经验,降低了医生的学习曲线,提升了种植精度和效率。

原理介绍
雅客智慧是采用的双目相机+二维棋盘格进行配准和定位,迪凯尔和瑞医博采用定位仪+光学小球/二维棋盘格进行定位,目前两种主流的形式,但是原理大都相同,主要功能是辅助医生定位种植部位。利用配准技术将术前获取的患者三维影像与术中患者的空间位置进行匹配;通过定位技术在手术过程中实时跟踪种植器械与患者的位置关系,并在三维影像中显示出来;利用导航技术通过机械臂带动手术器械辅助医生精准定位种植部位。
以瑞医博口腔种植机器人进行原理解析:
产品组成:
产品整体分为两块,机械臂台车和定位仪台车,定位仪负责识别引导机械臂到目标位置,光学定位组件,包括一系列用于配准的配准支架,尖端注册工具,光学小球或者二维棋盘格,手机夹持器,脚踏开关,手术导航软件组成。
预期用途:
辅助医生定位种植部位。利用配准技术将术前获取的患者三维影像与术中患者的空间位置进行匹配;通过导航技术在手术过程中实时跟踪种植器械与患者的位置关系,并在三维影像中显示出来;利用定位技术通过机械臂带动手术器械辅助医生精准定位种植部位。
适用范围:
用于成人口腔种植手术过程中术前手术计划和术中导航定位。
设计原理:
根据我目前对手术机器人的理解,把系统的控制原理整理了一下。首先对病人进行扫描,获取Dicom图像,然后在软件系统中进行重建和手术规划,制定手术路径,在术中,利用定位配准系统将手术空间的各个坐标系转换到统一机器人坐标系下,然后,机器人运动到指定路径,医生进行手术。

1.CT扫描获得CT数据,一般为Dicom切片序列。
2.手术规划、三维重建
术前计划就是在患者的CT三维影像上调整放置好种植体,得到种植路径。
3.配准
配准是指空间配准通过立体定位跟踪系统,在手术中确定手术器械和患者的相对关系,并与术前的CT模型整合显示在一起,有效的指导手术计划,实时引导手术的进行,同时空间配准可以实现手术器械的可视化与实时跟踪,实现不同坐标系的统一,配准的过程其实就是求不同坐标系之间变换矩阵的过程,目的就是为了在患者实际临床位置和屏幕上的模型位置之间建立一种实时的转换关系。
4.坐标系
在手术导航过程中,存在着多个空间变换关系,
- 定位仪坐标系 O (Optical)
- 机械臂基座坐标系 B (Base)
- 机械臂末端TCP坐标系 E (End)
- 患者CT三维影像坐标系 C (CT)
- 患者自身的物理坐标系 S (Space)
患者术前佩戴u型管S扫描cbct,术中使用U型管上面灰度较高的金属小球做配准,然后在u型管上面连接B tracker,关系一般使用固定数据,ndi O看到负责连接B tracker 和机械臂末端的A tracker,A tracker和机械臂末端E的关系使用手眼标定拿到或者使用固定数据,E和B基座的关系运动学可以给出,种植机针尖的位置标定需要额外佩戴一个tracker做和A tracker的标定。整个关系就清楚了。