本篇文章老王进一步从PID控制系统的比例积分微分控制器原理出发,分析了PID控制器控制参数的调整以及控制器性能基本指标,并通过与梯度系统主要性能指标的对比分析,进一步明确了PID控制器在MR系统中的重要作用。
在分析具体梯度系统控制性能之前,我们还是进一步分析PID控制器,首先还是PID控制系统框图:


我们可以清晰的看出简单来讲PID控制是对误差(期望值与当前值的差:err(t))进行计算从而产生控制变量(U(t))从而推动控制对象改变状态,那么我们分开来看,控制器就分成了3部分:
Kp-比例控制器。简单的将误差放大Kp倍得到控制变量,从这个角度来看它是一个开关控制器,用老王之前讲的4K磁体压力控制来举例,如果磁体压力低于30mbar这个阈值,那么当前的压力值与阈值的差就是误差,那么加热器的工作就有以下三种状态:
a. 当误差不大时,加热器“轻轻的”加热一下。
b. 当误差降低了比较多,加热器“稍微用力”加热一下。
c. 当误差非常大,磁体压力已经下降太多的时候,加热器“开足马力”加热。
而从比例控制的控制可以看出,它就是一个简单的线性控制器,使用它可以实现简单的控制,但是想要实现系统的稳定是很难的,因为他就是一个开关。同时需要注意PID控制器一般来说无论怎样组合比例控制器都是必须作为基础存在的。
Ki-积分控制器。控制参数已经不是简单的误差了,而是误差的积分,换句话说用历史累计误差作为变量。还是用4K磁体压力控制来举例,依然设定磁体压力30mbar这个阈值,磁体压力目前处于10mbar,在比例控制器的作用下磁体压力慢慢升高,到25mbar左右,但是由于冷头的工作效率非常高,而比例控制器是用误差为变量来控制的,此时比例控制的加热器加热效率等于冷头制冷效率,磁体压力稳定到了25mbar,但是始终达不到我们想要的30mbar,这个时候积分控制器就起到作用了。由于始终存在一个误差项,那么随着时间的增加误差的积分(累加)值不断增大,此时用累加值作为控制变量的积分控制就开始控制加热器工作,最终达到30mbar。可以看到积分控制器的目的是让被控物理量尽可能接近目标值。
Kd-微分控制器。控制参数是误差的微分值,用物理术语就是控制参数是误差变化的“速度”。我们可以看到无论比例控制器还是积分控制器,他们都近似于开关控制,因此整个控制系统因为外界的扰动等因素在设定值附近会反复变化,而微分控制器的作用就是让物理量的变化速度趋于0,无论何时物理量有了速度,微分控制器就会向相反的方向用力,尽可能刹住这个变化,从这个角度来讲微分控制器更像是弹簧的阻尼。
学习了PID三个控制器的原理与作用后,我们知道控制器的作用是同时保证系统的误差,稳态,变化速度最小,用一个变化图来描述可以更加直观的看到三个参数的作用:

当三个参数调整能够收敛之后,就需要评估控制系统的控制性能了,一般来说需要关注以下三个指标:
1. 稳态时间,也叫爬升时间,是指从控制器输出信号作用于系统开始到稳定的时间。其实理论上达到稳定的时间是无穷长的。通常我们取稳态的正负2%。
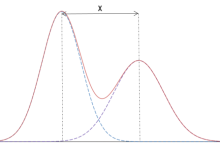
2. 超调量,也叫OFFSET,是衡量调节品质的一个量。当系统输出超过稳态值时,输出的最大值减去稳态值的差除以稳态值乘以百分之百得到的一个输出最大偏差比。超调反映的是控制系统在达到稳态前控制作用最糟糕的结果。
3. 稳态误差,系统在稳态下的控制精度的度量。控制系统的输出响应在前期爬升过程结束后的变化形态称为稳态。稳态误差为期望的稳态输出量与实际的稳态输出量之差。控制系统的稳态误差越小说明控制精度越高。

有了这些基础理论,我们接下来结合MR的梯度系统对照分析。首先我们先放出老王之前介绍过的梯度产生的基本原理图。

实际上MR梯度系统调试的第一步就是对梯度放大器输出电流进行校准,而校准的方法其实就是调整每个梯度轴的PID控制参数




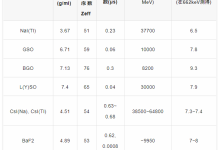
老王之前还介绍了一个梯度系统比较重要的指标梯度精度,比如某家厂商的指标:
![]()
那么实际上梯度精度对应的就是梯度放大器PID控制里面的稳态精度,也就是直接与Ki和Kd相关。

同时通过PID控制的基本知识,我们可以看到一些梯度性能里面的基本规律:
1. 如果只是简单的想提高常规的梯度强度,那么从PID控制的角度来讲通过增加Ki积分控制器的控制参数,并使用大功率放大器可以简单实现,但是对应的可能就会带来稳态时间的大幅度提高。
2. 如果只是简单的提高常规参数里面的梯度切换率,那么通过加大比例控制器Kp的参数就可以实现,但是对应的可能就会带来很大的稳态误差。
因此MR梯度系统在不牺牲其它性能的条件下对梯度强度和切换率的提高需要进行大量的工作,不是简单的通过修改算法就能够轻易实现的,而往往需要对PID控制器甚至梯度系统硬件结构进行升级以及大量的技术积累,而这恰恰是目前MR领域三大家与其它厂家天然的技术鸿沟。