颅脑神经功能重要、结构复杂、组织强度低,对颅脑神经进行各种手术难度高、风险大,例如脑部肿瘤切除、癫痫病灶切除等一直以来都是神经外科的难点,为了实现精确的手术位置指引,定位病灶,医学界作出了持续的努力,得到了不断革新优化的手术导航方案。
本研究基于手术导航系统的出现和应用,将神经外科的手术导航发展历史分为框架立体定向神经外科阶段、神经外科手术导航系统阶段和神经外科手术导航定位系统阶段,现报告如下。
1.神经外科对手术导航的需求和历史发展阶段
1.1框架立体定向神经外科阶段
1947年美国Spiegel和Wycis发明了专为人类应用的脑立体定向仪,1949年LarsLeksell教授设计了第一代Leksell头架,Leksell头架及其改进型成为后续主流使用的立体定向仪,但是这些早期的立体定向仪仅依靠机械结构,精度低,创伤大,对于神经外科手术并没有实现预期的帮助作用,出现后就进入了较为缓慢的发展阶段。1980年代以后,随着CT和MRI技术的普及,脑立体定向仪与CT、MRI结合使用,使得脑立体定向仪的准确性和安全性大为提高,一定程度满足了神经外科手术的需求,部分医师已经可以借助头架完成较大难度的DBS手术,积累了丰富的手术经验,并制定了标准化手术流程。
但是使用头架仍然存在众多问题:(1)头架自身重量过大,对患者负荷较重,不能适用于儿童;(2)创伤多,患者依从性差;(3)头架结构复杂,容易遮挡医师手术视线,限制手术视野;(4)头架占据关键的空间位置,阻碍手术工具的使用;(5)连续进行多次的定位时,需要人工持续操作和计算,操作不便,注册时间长;(6)依赖于术前影像,术中组织结构发生形变、漂移时,定位精度显著下降。
1.2神经外科手术导航系统阶段
1980年代后期,高分辨率的三维神经影像技术获得普及和应用,三维图像和数字可以实现互相转化,高速、大容量计算机工作站的出现,推动了神经外科手术导航系统的产生。早期神经外科手术导航系统普遍采用光学导航以获得较高的导航精度,代表公司有美国Medtronic公司的StealthStation系统,美国Stryker公司的SmartVision系统,德国BrainLAB公司的VictorVision系统等;同时期发展的电磁导航、超声导航等主要用于腹腔器官的手术导航。
神经外科手术导航系统的早期型号一般包括工作站(加载相关软件的计算机、显示器和鼠标键盘等输入装置)计算机和相关软件,定位追踪装置(红外线定位仪),参考架,导航探针,头部固定装置和导航探针上带有可以被定位追踪装置识别的标志物(如红外反光球等)。
其主要使用流程为:(1)工作站接收医学影像信息,进行手术路径设计、肿瘤病灶勾画等;(2)使用头部固定装置将头部固定,将参考架与头部(或病床)固定连接,使用定位追踪装置借助参考架持续获得头部在手术导航系统坐标系中的空间位置;(3)使用导航探针依次拾取头皮上的标志点,与影像中的标志点进行匹配,从而完成注册,即将医学影像空间坐标系和现实空间坐标系建立对应关系,从而将医生在影像空间计划的手术路径映射到现实空间中;(4)注册后,即可使用导航探针或装配标志物的手术器械进行实时导航的手术操作。
1.3神经外科手术导航定位系统阶段
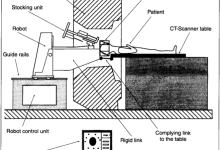
神经外科手术导航系统具备实时灵活导航定位追踪的优势,但由于神经外科某些微创手术需要精准定位引导,需要在导航指引的同时借助机械臂进行定位定向,由此神经外科手术导航系统结构上包含了机械臂,进入了神经外科手术导航定位系统阶段。起初的机械臂仅有机械结构,没有电气元件,由人工拖拽运动及手工锁定。此种机械臂的出现时间较早,成本低,但是其操作繁琐,定位耗时;执行复杂手术时,效率低,手术时间长。其中包括若干生产厂家:美国Medtronic、德国Brainlab、深圳安科、新博医疗等。后续出现的机械臂具备电气元件及抱闸锁紧装置,可以调整机械臂各个关节使之达到预定坐标,其中生产厂家包括华志微创等。
随着通用机械臂的发展成熟,将自动机械臂作为辅助定位的装置加入手术导航定位系统的方案得以实现,MedtechS.A.在其研发的ROSA产品中首次采用自动机械臂,该机械臂具有传感器和6个关节,医生可以通过安全脚踏控制机械臂,非常可靠;根据术前设计的路径机械臂自动置位,医生可以在固定的通道下进行手术操作,使手术更加安全稳定;其机械臂的力传感功能,可保证手术过程中遇到障碍物时紧急停止,使整个手术非常安全,另外还将立体定向脑电图(stereotacticelectroencephalogram,SEEG)手术适用范围增加到儿童。
国内的华科精准等公司也制造销售了具有类似机械臂的神经外科导航定位系统设备;自动机械臂能够主动运动,根据机械臂自身坐标系进行定位,在连续定位、可操作性、安全性方面有大幅度提高,对于深部电极植入以确认癫痫病灶位置,高难度位置的组织活检等术式有良好的临床效果。由于医生在部分手术时需要更大的操作空间,一些研究人员寻求具有相同定位导航功能的微型机器人。中欧智薇(上海)机器人有限公司开发了一种微型机器人,其利用特定的运动方式结构设计,在一定范围内可以实现与六轴机械臂相等的功能。国内华科精准也研发了类似的微型定位机器人。
2.手术导航系统的注册方式
手术导航系统历经多年的发展,神经外科手术导航系统的使用过程中,注册环节始终是整个手术的核心,注册过程中使用的注册方法不断得到改进,根据其技术原理,大致分为以下五种方式。
2.1光学定位仪追踪的坐标点注册
从1990年代开始至今,光学定位仪追踪的坐标点注册主要有红外光学追踪引导的坐标点注册和可见光学追踪引导的坐标点注册。红外光学定位仪的组成包括红外光源和红外相机,通过红外线定位仪和导航探针拾取标记点的位置,从而完成注册。其中一种是通过粘贴在头皮表面上的标记点进行注册,该方法无创、经济,但问题是容易因头皮形变和移动造成误差;另外一种是通过固定在颅骨上的骨性标记点进行注册,相对于头皮贴标记点注册,此种注册方式的精度更高,但会造成额外的损伤,患者依从性相对稍差。采用红外光学追踪引导的坐标点注册的方式不易受光线干扰,故采用此种注册方式的厂家较多,其中包括美国Medtronic、美国Stryker、德国Brainlab、法国公司MedtechS.A.、中国的华科精准、深圳安科、上海复旦等公司。
可见光学定位仪的结构为双目或多目的可见光摄像机,其成本比较低,仅利用手术室自身环境光进行追踪定位标记点,但是双目相机的识别容易受到周围环境光线强度的影响,会导致注册精度下降,因此采用此种注册方式的厂家较少。
2.2激光表面轮廓注册法
2009年至今,开始使用激光扫描获取点云进行注册,具体的该注册方法是用手持式激光笔或机械臂带动激光测距仪,向待注册部位投射多个激光点,从而形成点云信息,然后与医学图像点云进行配准,完成注册。该技术可以在10min内采集几百至几千个激光点信息,配准精度相对于第一阶段有明显提升,注册时间缩短。例如法国公司MedtechS.A.在2009年进行临床试验的神经外科手术定位导航设备ROSAONE,美敦力StealthStation_S7,国内的安科导航仪(ASA-610V型号)、华科精准医疗科技有限公司的导航系统(SR1)等市售产品都可使用这种注册方法。激光扫描可以采用点激光器(激光测距仪)或线激光器,该方法无须安装骨钉或者粘贴透皮贴标志点,省略术前CT,流程简便,节约时间,患者接受度较高。
2.3结构光注册法
2019年开始出现了一种新的注册方法,主要资料来自公开的专利技术。华科精准医疗科技有限公司在2019年1月21日提交的一种手术机器人系统及其使用方法(CN109549705A)中提出了含有3D结构光扫描模块的机器人手术导航系统;7DSURGICALINC在2019年7月12日提交的专利(US20190333253A1)提出采用结构光扫描仪获取患者体表点云数据进行注册;MedtechS.A.公司在2020年2月12日提交的专利申请(US20210244485A1)也提出了使用3D结构光进行注册的方法。
二代注册方法激光表面轮廓注册法所使用的激光三角测量法具有非常高的分辨率和测量精度,但在实际应用中受相机和激光光源横向距离的限制,测量范围小,测量时间长。而结构光投影3D成像的工作原理是利用结构光经过光学投影系统投射至被测物体表面,然后采用图像获取设备(如CCD或CMOS相机)采集被物体表面调制后发生变形的结构光图像,利用图像处理算法计算图像中每个像素点与物体轮廓上点的对应关系;最后通过系统结构模型及其标定技术,计算得到被测物体的三维轮廓信息。
结构光可以迅速地获取百万级的点云数据,弥补了激光测量时间长,范围小的问题,在保证较高空间分辨率的同时,能有效解决目标表面斜率阶跃变化的问题,同时具有较大的视场范围,能够弥补激光单点扫描的效率不足问题。刘焕光等对结构光注册技术进行了临床试验,验证了结构光注册方法具有注册时间短、定位误差小、安全性能好的优势。
2.4O型臂术中CT导航技术
现国内常见的O型臂术中CT导航技术由O型臂手术图像系统和StealthStation手术导航系统组成,通过小型化可移动的O型臂术中CT可以在术中实时获得术中高精度影像,通过与术前影像融合,或者识别StealthStation手术导航系统术中定位标志,以达成注册及导航。现该技术常用于脊柱手术中,但在神经外科其他领域也有着广阔的应用前景,例如进行DBS等高精度手术。
2.5骨性标志接触性注册技术
骨性标志接触性注册技术是国内现常用的高精度神经外科手术常用的注册技术,法国MedtechS.A.、中国的华科精准等公司的神经外科手术机器人产品均可使用该技术进行DBS、SEEG、立体定向活检等手术导航。普遍反映技术要求复杂、没有规范化的机器人辅助DBS手术流程,尤其是手术前需要在患者头部颅骨上植入5个用于定位和注册的专用金属钉,长度至少深入颅骨板障4~7mm,对于部分颅骨较薄患者存在穿透颅骨、甚至引发颅内出血的风险并增加感染几率,严重限制了手术机器人系统的临床应用,该技术也面临被更多创新性的无创注册方式所取代。
3.手术机器人使用经验
本研究引进ROSA神经外科导航系统一台,该系统使用激光表面轮廓注册法,具有有源机械臂;具体包括导航主机及装载的若干临床应用软件、机械臂、定位追踪系统、导航工具等,其机器臂为六自由度机器臂,整合有力/力矩传感器,具有触觉反馈模式,可根据操作者施加的力实时作出调整,以按照操作者的任务要求进行移动。
但基于ROSA神经外科导航系统的局限性,特别是上文提及的骨钉接触式注册方式,本研究使用中一直在思考这种颅骨骨钉的注册方式是否有安全便捷无损伤的替代方式,经过多次反复的实验,目前已经提出了多种免除颅骨骨钉的无损伤接触式注册方式,并进行了初步的验证,有待于进一步完善并应用到临床。该系统可以执行多种术式,例如术中导航/功能区定位,DBS脑起搏器深部电极植入术,SEEG深部电极植入术及毁损术,脑组织活检,脑血肿排空术,脑脓肿引流术。
根据本研究的使用经验,机械臂辅助的神经外科定位导航系统,在复杂手术的效率上显著高于没有机械臂辅助的手术导航系统。ROSA神经外科导航系统在国内其他医院也开展了多种临床试验和手术治疗。刘元钦等回顾性分析了14例患者使用ROSA手术机器人的治疗结果。蔡晓东等使用ROSA机器人辅助手术,病种包括帕金森病,特发性震颤,脑深部病变,三叉神经痛以及癫痫,45例患者术后均达到预期治疗效果,无严重并发症发生,认为无框架立体定向手术机器人可以显著提高手术精准度和安全性。
王慧杰等验证了局部麻醉下ROSA机器人系统辅助SEEG电极植入手术的精准性与安全性,局部麻醉下行ROSA机器人系统辅助SEEG电极植入精准、安全,其电极入点误差和靶点误差与全身麻醉相比无明显差别。王惠清等通过将ROSA机器人辅助帕金森病丘脑底核深部脑刺激电极植入与传统的Leksell头架辅助做对比研究,发现ROSA机器人辅助电极植入可明显改善电极植入精度。
4.总结与展望
神经外科手术导航设备,降低了很多神经外科手术的难度和门槛,减少了医师的学习培训时间,缩短了手术时间,提高了手术成功率,为神经外科的疾病治疗提供了有力辅助。现有的神经外科手术导航系统已经可以解决部分临床问题,但是仍然有更多的问题需要解决,结合本研究的使用经验,展望手术导航系统的发展,至少还有以下若干改进方向:
(1)更高效的空间信息获取,这一需求在一定程度上已经被手术导航系统控制机械臂带动结构光扫描仪满足,通过结构光进行感知,相较激光采集点云已经有较大提升,可以快速获取目标部位和环境的点云信息,为后续的自动化、智能化操作提供了更多判断依据;(2)决策智能化,手术导航系统可以根据多模态的医学影像建立三维模型,通过已有的手术经验信息训练神经元网络,计算并推荐最优的植入路径规划;(3)执行自动化,确定最优的植入路径后,手术导航系统为机械臂计算出最佳运动路线,高效并安全地将定位通道连续移动到预期位置。
来源:邱畅,董文文,章文斌.神经外科手术导航系统发展概述与展望[J].临床神经外科杂志,2022(03):352-355.